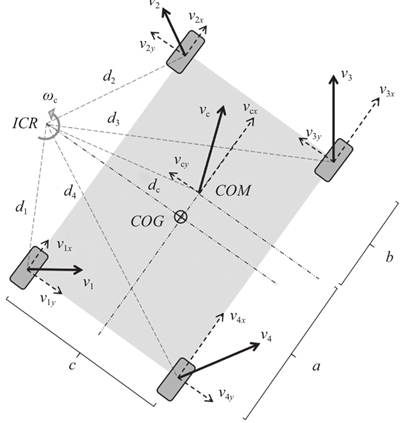
6.Four wheel differential model for mobile robots
A four-wheel differential model for mobile_robots can be found as:
Final dynamic:
\[\left[\begin{array}{c} V_L \\\ V_R\end{array}\right] =\left[ \begin{array}{cc} 1 & -\frac{c}{2} \\\ 1 & \frac{c}{2} \end{array} \right] \left[ \begin{array}{c} v_{cx} \\\ w_c \end{array}\right].\]References: